Contents
- 1 Scope of Linear Viscoelastic Behaviors
- 2 Linear Viscoelastic Behaviors in Simple Shear
- 3 Mechanical Model Analogies and Spectral Analysis
- 4 Time-Temperature Reduction
- 5 Reference
Scope of Linear Viscoelastic Behaviors
“Viscoelastic”
Starting with the two idealized cases describing condensed matters:
1. Purely elastic solid: $$\sigma \propto \epsilon$$
2. Purely viscous liquid: $$\sigma \propto \dot\epsilon$$
Viscoelastic system is a deviation from these two ideal cases.
Viscoelastic materials exhibit behavior that combines liquid-like and solid-like characteristics under a conventional timescale.
“Linear” vs. Nonlinear
A straightforward criteria to determine if viscoelastic behavior is in linear region is that the stimulus and response are proportional. For example, in a mechanical experiment, if the measured modulus is not a function of input stress or strain, then the response is in linear viscoelastic region.
A strict definition according to Ferry is quoted as:
If both strain and rate of strain are infinitesimal, and the time-dependent stress-strain relations can be described by linear differential equations with constant coefficients, we have linear viscoelastic behavior.
This definition helps formulating stress-strain relations using material properties (“constant coefficients” in the quoted sentence) that are only dependent on time, temperature, aging time, etc., but independent of stress and/or strain.
Linear Viscoelastic Behaviors in Simple Shear
A homogeneous deformation of an isotropic material can be decomposed into three parts: bulk deformation (volume change), shear deformation (shape change), and thermal deformation (temperature change). The three parts have the same functional form within linear viscoelastic assumption.
Here we use the simple shear deformation as an example to define the linear viscoelastic material properties.
Constitutive Equations for Transient (Time-Dependent) Behaviors
In the case of simple shear, stress and strain are expressed as:
$$\sigma_{ij} = \begin{pmatrix}0 & \sigma_{12} & 0 \\\sigma_{12} & 0 & 0 \\0 & 0 & 0\end{pmatrix},
\quad \epsilon_{ij} = \begin{pmatrix}0 & \epsilon_{12} & 0 \\\epsilon_{12} & 0 & 0 \\0 & 0 & 0\end{pmatrix}$$
Stress and strain components ($$\sigma_{12}, \epsilon_{12}$$) are related by the following constitutive equations:
In the Form of Relaxation Modulus $$G(t)$$
Assuming the effects of sequential changes in strain are additive, stress can be expressed as
$$\sigma_{12}(t)=\int_{-\infty}^t G(t-t^\prime)\dot\epsilon_{12}(t^\prime) dt^\prime \tag{1}$$
where $$G(t)$$ is relaxation modulus measured in stress relaxation experiment after a sudden strain.
In the Form of Creep Compliance $$J(t)$$
Alternatively, the strain can be expressed in terms of history of stress as
$$\epsilon_{12}(t)=\int_{-\infty}^t J(t-t^\prime)\dot\sigma_{12}(t^\prime) dt^\prime \tag{2}$$
where $$J(t)$$ is creep compliance measured in creep after a sudden stress.
Notes
- The linked pages show stress and strain responses in stress relaxation and creep experiments within linear viscoelastic region.
- These two constitutive equations assume that the effects of mechanical history are linearly additive. In these two equations, material properties are only dependent on time, i.e., $$G = G(t)$$, which helps describe different sequences of straining.
- However, if the effects of temperature and/or aging time histories are of interest, e.g., $$G = G(t; T, t_{aging})$$, linear viscoelastic assumption alone is not sufficient to describe or to de-convolute the effects of current temperature and/or thermal histories. Additional assumption such as “thermorheological simplicity” is needed which says the different relaxation processes follow the same temperature dependence.
Constitutive Equations for Dynamic (Frequency-Dependent) Behaviors
This session talks about material properties obtained by dynamic mechanical experiments. In the next session we will talk about the relations between time-domain and frequency-domain material properties.
Dynamic Moduli
Suppose a sinusoidal signal of strain is exerted on viscoelastic material, i.e., $$\epsilon=\epsilon_0\sin\omega t$$, and $$\dot\epsilon=\epsilon_0\omega \cos\omega t$$, then Eq.(1) becomes $$\begin{align} \sigma(t)&=\int_{-\infty}^t G(t-t^\prime)\epsilon_0\omega\cdot \cos\omega t^\prime dt^\prime \\ &\stackrel{s=t-t^\prime}{=} \int_{0}^\infty G(s)\epsilon_0\omega\cdot \cos(\omega (t-s)) ds \\ &= \int_{0}^\infty G(s)\epsilon_0\omega\cdot (\cos\omega t \cos\omega s + \sin\omega t \sin\omega s) ds \\ &=\epsilon_0\underbrace{(\int_{0}^\infty G(s)\sin\omega s ds)}_{G^\prime(\omega)}\sin\omega t + \epsilon_0\underbrace{(\int_{0}^\infty G(s)\cos\omega s ds)}_{G^{\prime\prime(\omega)}}\cos\omega t \tag{3} \end{align}$$ In the last line of Eq.(3), the quantities in brackets are functions of frequency. These two terms are defined as storage shear modulus $$G^\prime$$ and loss shear modulus $$G^{\prime\prime}$$. Eq.(3) is thereby written as: $$\sigma = \epsilon_0(G^\prime\sin\omega t+G^{\prime\prime}\cos\omega t) \tag{4}$$ If the viscoelastic behavior is linear, the stress response is also sinusoidal, with a phase shift compared to the strain signal. Phase angle $$\delta(\omega)$$ is used to denote the phase shift between stress and strain signals. Stress can also be written as: $$\sigma = \sigma_0 \sin(\omega t+\delta)=\sigma_0 \sin\omega t\cos\delta+\cos\omega t\sin\delta \tag{5}$$ Comparing Eq.(4) and Eq.(5), dynamic shear moduli are related to measurable signals (stress, strain and phase angle) by: $$\begin{align} G^\prime &= (\sigma_0/\epsilon_0)\cos\delta = G^*\cos\delta \tag{6} \\ G^{\prime\prime} &= (\sigma_0/\epsilon_0)\sin\delta = G^*\sin\delta \tag{7} \\ \tan\delta &= G^{\prime\prime}/G^\prime \tag{8} \end{align}$$
Dynamic Compliance
Dynamic shear compliances also have storage $$J^\prime$$ and loss $$J^{\prime\prime}$$ components. Their relations are given by the following equations. $$\begin{align} J^* &= \epsilon_0/\sigma_0 = 1/G^* \tag{9}\\ J^\prime &= J^*\cos\delta = G^\prime/(G^{\prime2} + G^{\prime\prime2}) \tag{10} \\ J^{\prime\prime} &= J^*\sin\delta = G^{\prime\prime}/(G^{\prime2} + G^{\prime\prime2}) \tag{11} \\ \tan\delta &= J^{\prime\prime}/J^\prime \tag{12} \end{align}$$
Dynamic Viscosity
In terms of dynamic viscosity, $$\eta^\prime$$ refers to the in-phase viscosity, meaning the stress and strain rate components are in phase, while $$\eta^{\prime\prime}$$ is the out-of-phase viscosity. Note that the phase relations for viscocity are the opposite to that of modulus or compliance, since strain rate and strain are 90 $$^\circ$$ out of phase. $$\begin{align} \eta^* &= \sigma_0/\dot\epsilon_0 = \sigma_0/\omega\epsilon_0 = G^*/\omega \tag{13}\\ \eta^\prime &= \eta^*\sin\delta = G^{\prime\prime}/\omega \tag{14} \\ \eta^{\prime\prime} &= \eta^*\cos\delta = G^\prime/\omega \tag{15} \\ \tan\delta &= \eta^\prime/\eta^{\prime\prime} \tag{16} \end{align}$$
Notes
Comparing viscoelastic behaviors to the two ideal cases in terms of phase angle $$\delta$$:
1. Purely elastic solid: stress and strain are in phase, $$\delta = 0, G^\prime = G^*, G^{\prime\prime} = 0, \eta^\prime = 0, \eta^{\prime\prime} = \eta^*$$
2. Purely viscous liquid: stress and strain are out of phase, $$\delta = 90^\circ, G^\prime = 0, G^{\prime\prime} = G^*, \eta^\prime = \eta^*, \eta^{\prime\prime} = 0$$
Interrelations of Time- and/or Frequency-Dependent Behaviors
Two Transient Functions
The creep compliance (Eq.2) and the relaxation modulus (Eq.1) are connected by the convolution integral relations: $$ \int_0^t G(\tau)J(t-\tau) d\tau = t\tag{17}$$ $$ \int_0^t J(\tau)G(t-\tau) d\tau = t\tag{18}$$
Transient and Corresponding Dynamic Functions
Storage and loss moduli can be obtained from relaxation modulus by Fourier transform:
$$\begin{align}
G^\prime(\omega) &= G_e + \omega\int_0^\infty (G(t)-G_e)\sin\omega tdt \tag{19} \\
G^{\prime\prime}(\omega) &= \omega\int_0^\infty (G(t)-G_e)\cos\omega tdt \tag{20}
\end{align}$$
where $$G_e$$ is the equilibrium modulus for a viscoelastic solid such as a crosslinked thermosetting polymer in rubbery region. $$G_e = 0$$ for a viscoelastic liquid such as a thermoplastic polymer in flow region.
Although not frequently used, relations between dynamic compliance components and creep compliance are given as:
$$\begin{align}
J^\prime(\omega) &= J_e + \omega\int_0^\infty (J_e-J(t)+t/\eta_0)\sin\omega tdt \tag{21} \\
J^{\prime\prime}(\omega) &= \omega\int_0^\infty (J_e-G(t)+t/\eta_0)\cos\omega tdt +1/\omega\eta_0 \tag{22}
\end{align}$$
For viscoelastic solids (e.g., rubbery-state thermosets), $$J_e$$ is the equilibrium compliance, $$t/\eta_0 = 0$$.
Mechanical Model Analogies and Spectral Analysis
We have defined the time- and/or frequency-dependent material properties and discussed the relations between them. In this section we will specify the functional form of time and/or frequency dependences (e.g., expressing $$G(t)$$ using Prony series) and the corresponding mechanical model assumption (e.g., Generalized Maxwell model).
Spring and Dashpot Elements
- The simplest mechanical analogous model to describe linear viscoelastic behaviors is a spring connected with a dashpot. The spring and dashpot elements represent pure elastic and pure viscous responses respectively.
- In the case of simple shear, the spring element represents rigidity $$G_i, 1/J_i$$ of a pure elastic solid, the dashpot element representing viscosity $$\eta_i$$ of a pure viscous liquid.
- The relaxation or retardation time is defined as $$\tau_i = \eta_i/Gi$$ which is a characteristic parameter that quantifies molecular mobility (i.e., how fast the material responds to external stimulus). It is a key variable that bridges constitutive models and experimentally measured material properties. Every consitutive model needs to address how $$\log \tau_i$$ is related to external variables such as temperature, deformation, aging time, etc.
- Shift factor ($$\log a$$) means the relaxation or retardation time with respect to a reference state, i.e., $$\log a=\log \tau/\tau_{ref}$$.
Maxwell Element
Maxwell element is represented by spring and dashpot connected in series. i.e., $$\epsilon = \epsilon_s + \epsilon_d, \sigma = \sigma_s = \sigma_d$$
For purely elastic spring and purely viscous dashpot, $$\sigma_s = G_i\cdot \epsilon_s, \sigma_d = \eta_i\cdot \epsilon_d$$
The constitutive equation can be derived as follows:
$$\begin{align}
\frac{d\epsilon}{dt} &= \frac{1}{G_i}\frac{d\sigma}{dt} + \frac{\sigma}{\eta_i} \\
&= \frac{1}{G_i}\cdot(G(t)\frac{d\epsilon}{dt}+\epsilon\frac{dG(t)}{dt}) + \frac{\sigma}{\eta_i} \\
d\epsilon/dt &= 0 @ s.s.\\
0 &= \frac{\epsilon}{G_i}\frac{dG(t)}{dt} + \frac{G(t)\epsilon}{\eta_i} \\
&= \frac{dG(t)}{G(t)} + \frac{G_idt}{\eta_i} \\
&= logG(t)-logG(t=0) + G_it/\eta_i \\
G(t)/G_i &= \exp(-G_it/\eta_i) = \exp(-t/\tau_i) \\
G(t) &= G_i\exp(-t/\tau_i)\tag{23}
\end{align}$$
Here, $$\tau_i$$ is the relaxation time, which represents how fast the material relaxes in response to external stress.
Other relaxation functions can be derived by solving ODEs in the same manner as for Eq.(23) and are summarized as follows:
$$\begin{align}
J(t) &= J_i+t/\eta_i, \tag{not creep compliance} \\
G^\prime(\omega) &= G_i\omega^2\tau_i^2/(1+\omega^2\tau_i^2) \tag{24} \\
G^{\prime\prime}(\omega) &= G_i\omega\tau_i/(1+\omega^2\tau_i^2) \tag{25} \\
\eta^\prime(\omega) &= \eta_i/(1+\omega^2\tau_i^2) \tag{26}\\
J^\prime(\omega) &= J_i \\
J^{\prime\prime}(\omega) &= J_i/\omega\tau_i = 1/\omega\eta_i \\
\tan\delta &= 1/\omega\tau_i
\end{align}$$
Note that the Maxwell element can describe stress relaxation behaviors within linear viscoelastic region, but is not a good assumption for creep.
Voigt Element
Voigt element represents spring and dashpot connected in parallel, where $$\epsilon = \epsilon_s = \epsilon_d, \sigma = \sigma_s + \sigma_d$$. $$\tau_i$$ is the retardation time which measures the retardation effect of dashpot that delays the spring reaching its equilibrium length. The viscoelastic functions are given as follows: $$\begin{align} J(t) &= J_i(1-\exp(-t/\tau_i)) \tag{27} \\ G(t) &= Gi \\ G^\prime(\omega) &= G_i \\ G^{\prime\prime}(\omega) &= G_i\omega\tau_i = \omega\eta_i \\ \eta^\prime(\omega) &= \eta_i \\ J^\prime(\omega) &= J_i/(1+\omega^2\tau_i^2) \tag{28} \\ J^{\prime\prime}(\omega) &= J_i\omega\tau_i/(1+\omega^2\tau_i^2) \tag{29} \\ \tan\delta &= \omega\tau_i \end{align}$$ Voigt element can describe linear creep behaviors, but not relaxation behaviors.
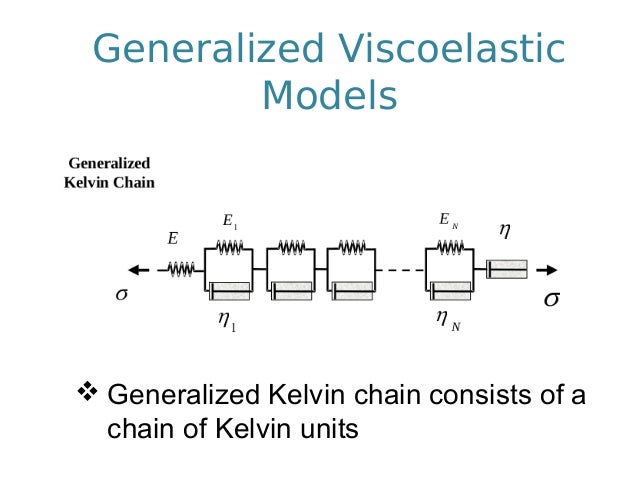
Generalized Maxwell and Voigt Models
In generalized Maxwell model, multiple Maxwell elements are connected in parallel. Material response at a given time $$t$$ is the totality of all elemental behaviors. The contribution of the ith element $$G_i$$ follows Eq.(23), and the total relaxation modulus $$G(t)$$ is given as: $$G(t)=\sum_{i}^{} G_i\exp(-t/\tau_i) \tag{30}$$ The constitutive equation Eq.(1) becomes: $$\sigma(t) = - \int_{-\infty}^t (\sum_{i}^{} G_i\exp(-(t-t^\prime)/\tau_i))\dot\epsilon(t^\prime) dt^\prime$$
Similarly, the generalized Voigt model is multiple Voigt elements connected in series. The creep compliance is the sum of each Voigt element (sum of $$J_i$$ given by Eq.27): $$J(t)=\sum_{i}^{} J_i(1-\exp(-t/\tau_i)) \tag{31}$$ The constitutive equation (Eq.2) becomes: $$\epsilon(t)=\int_{-\infty}^t (\sum_{i}^{} J_i(1-\exp(-(t-t^\prime)/\tau_i)))\dot\sigma(t^\prime) dt^\prime$$
{kind=link}
The Relaxation and Retardation Spectra
If the relaxation time in generalized Maxwell model becomes infinitesimal, the contribution of each Maxwell element (Eq.23) to the total rigidity becomes $$Hd\log\tau$$, where $$H$$ is the spectral intensity of continuous relaxation spectrum. This could be considered as rewriting Eq.(30) in integral form: $$G(t)=G_e+\int_{-\infty}^{\infty} H\exp(-t/\tau_i) dlog\tau \tag{32}$$ The equilibrium modulus $$G_e$$ for viscoelastic solids (e.g., crosslinked polymer) corresponding to the spectral intensity at $$\tau = \infty$$ (e.g., in rubbery state). Dynamic moduli can be obtained by integration of Eq.(24) and Eq.(25): $$\begin{align} G^\prime &= G_e + \int_{-\infty}^{\infty} (H\omega^2\tau^2/(1+\omega^2\tau^2)) dlog\tau \tag{33}\\ G^{\prime\prime} &= \int_{-\infty}^{\infty} (H\omega\tau/(1+\omega^2\tau^2)) dlog\tau \tag{34}\\ \eta^\prime &= \int_{-\infty}^{\infty} (H\tau/(1+\omega^2\tau^2)) dlog\tau \tag{35} \end{align}$$ At low frequency (or high temperature) limit, $$G^\prime \propto \omega^2, G^{\prime\prime} \propto \omega$$.
If the retardation time in generalized Voigt model becomes infinitesimal, Eq.(31) is written in terms of the retardation spectrum ($$L$$ spectrum) as: $$J(t)=J_g+\int_{-\infty}^{\infty} L(1-\exp(-t/\tau_i)) dlog\tau +t/\eta_0 \tag{36}$$ where $$J_g$$ is the glassy-state compliance representing the instantaneous response at $$\tau = 0$$, while the $$t/\eta_0$$ term is the contribution of Voigt element at $$\tau = \infty$$. Dynamic compliances are given by: $$\begin{align} J^\prime &= J_g + \int_{-\infty}^{\infty} (L/(1+\omega^2\tau^2)) dlog\tau \tag{37}\\ J^{\prime\prime} &= \int_{-\infty}^{\infty} (L\omega\tau/(1+\omega^2\tau^2)) dlog\tau + 1/\omega\eta_0 \tag{38} \end{align}$$
Discrete Relaxation Spectrum (Prony Series Expansion of $$G(t)$$)
A finite number of Maxwell elements connected in series represents a discrete relaxation spectrum, each element representing one exponential term in Eq.(30). Eq.(30) is also a Prony series expansion of $$G(t)$$ that is frequently used to curve-fit stress relaxation data by parameterizing $$G_i$$ and $$\tau_i$$. Discrete relaxation spectrum (or Prony expansion) uses a finite number of parameters ($$G_i, \tau_i$$) to represent directly measured data, which is a simplified representation that allows plugging material behaviors into a macro-scale model.
To represent other types of viscoelastic behaviors, for example $$G^\prime, G^{\prime\prime}$$ in dynamic mechanical analysis, or $$J(t)$$ in creep experiment, the discrete form of Eq.(33)-Eq.(38) will be used.
Notes on Spectral Analysis
- Parameterization of {$$H, \tau$$} (or {$$G_i, \tau_i$$}) based on measured {$$G(t), t$$} data is an ill-posed problem, which have numerous sets of solutions for {$$H, \tau$$}.
- Choosing the most appropriate set of solution {$$H, \tau$$} requires additional restrictions. For example, in most literature, relaxation times $$\tau s$$ are specified with a uniform spacing. Spectral intensities $$Hs$$ are constrained by regularization to prevent fluctuation.
- Further discriminating between sets of solutions requires additional molecular-level mechanisms of relaxation processes. e.g., according to Rouse model, $$\log H vs. \log\tau$$ has a slope of $$-1/2$$.
- For the purpose of FEA, it is preferred to use least amount of parameters {$$H, \tau$$} to describe all data for a given time and temperature range.
- Summary on functions to curve-fit viscoelastic data:
- Relaxation modulus: Eq.(30), i.e., sum of Eq.(23)
- Creep compliance: Eq.(31), i.e., sum of Eq.(27)
- Storage & loss moduli: sum of Eq.(24)(25)
- Storage & loss compliances: sum of Eq.(28)(29)
Time-Temperature Reduction
Empirical Determination of Reduced Time
The effect of temperature on linear viscoelastic behavior is described in terms of reduced time, $$t^* = t/a_T$$, where the $$a_T$$ is the time-temperature shift factor. Empirical determination of shift factors follows three steps:
- experimentally measure material properties under isothermal conditions at specified temperatures
- shift experimental data at $$T_1$$ along time or frequency axis to partially overlap with the responses at $$T_{reference}$$
- the amount of shift along time or frequency axis is the shift factor $$\log a_T = \Delta\log t$$
This method is called time-temperature superposition. It is only valid if the material is thermorheologically simple at the temperature range of interest. It is not always true that the material is time-temperature reducible. Empirical functions such as WLF equation or VTF equation are used to fit shift factors vs. temperature data.
{kind=link}
Theoretical Validation for a Polymer Melt
Although the reduction variable was proposed as an empirical method, it is valid according to Rouse theory. Rouse theory (including later modifications) is a molecular theory that explains polymers in a melt state (i.e., ~$$20^\circ C$$ above $$T_g$$ or higher) without entanglement, or polymers diluted by small-molecular solvents. Time-temperature superposition works wherever Rouse theory is applicable.
Based on Rouse theory for an undiluted polymer melt, modulus is derived as:
$$G(t) = (\rho RT/M) \sum_{p=1}^{N} \exp(-t/\tau_p) \tag{39}$$
where $$M$$ is molecular weight (independent of temperature), $$\rho$$ is density (dependent on temperature), the pth mode $$\tau_p$$ is:
$$\tau_p = 6\eta_0M/\pi^2p^2\rho RT \tag{40}$$
At a given temperature $$T^\prime$$, the modulus is
$$G(t, T^\prime) = (\rho^\prime RT^\prime/M) \sum_{p=1}^{N} \exp(-t/\tau_p^\prime) \tag{41}$$
where
$$\tau_p^\prime = 6\eta_0^\prime M/\pi^2p^2\rho^\prime RT^\prime = \tau_p^{ref}\cdot \eta_0^\prime\rho^{ref} T_{ref}/\eta_0^{ref}\rho^\prime T^\prime \tag{42}$$
The right-hand side of Eq.(41) can be written as
$$= (\rho^\prime RT^\prime/M) \sum_{p=1}^{N} \exp(-t/(\tau_p^{ref}\cdot \underbrace{\eta_0^\prime\rho^{ref}T_{ref}/\eta_0^{ref}\rho^\prime T^\prime}_{a_T}))$$
which has the same form as $$G(t/a_T, T_{ref})$$ where $$a_T = \eta_0^\prime\rho^{ref} T_{ref}/\eta_0^{ref}\rho^\prime T^\prime$$ .
Thus, in the flow region, when describing the relaxation modulus measured at $$T^\prime$$ with respect to the reference temperature $$T_{ref}$$, it is valid to shift the curves along $$\log t$$ axis horizontally by $$\log a_T$$.
Creep compliance is also reducible since is has the $$t/\tau$$ term (Eq.27) where $$\tau$$ is calculated by Eq.(40) for polymer melt.
Dynamic moduli and compliances can be expressed as reduced frequency $$a_T\omega$$, which can also be validated by replacing $$\omega\tau$$ terms in Eq.(24)(25) and Eq.(28)(29) using $$\tau_p$$ given in Eq.(40).
If Lack of Superposition
It is experimentally evident that time-temperature superposition doesn’t work as temperature is near and below $$T_g$$. One of the strategies to analyze or curve fit experimental data without superposing the entire curve could be:
- Analyze each isotherm using discrete spectrum method, with the constraint that the spectral intensity should be reserved when going to the next temperature.
- Calculate the shift factor of each spectral component along $$\log\tau$$ axis.
For example, if there are five isotherms of $$G(t)$$ at temperatures $$T_1, T_2, T_3$$, and the curves cannot overlap when shifting along $$\log t$$ axis, it means that
- the material is not thermorheologically simple at this temperature region,
- in the generalized Maxwell model, each element as characterized by {$$G_i, \tau_i$$} has a different temperature dependence.
- Assuming that $$G_i$$ is not affected by temperature, while $$\tau_i$$ of each Maxwell element is affected by temperature differently,
- At $$T_1$$, $$G(t) = G_1\exp(-t/\tau_{1,T_1}) + G_2\exp(-t/\tau_{2,T_1}) + G_3\exp(-t/\tau_{3,T_1})$$,
- At $$T_2$$, $$G(t) = G_1\exp(-t/\tau_{1,T_2}) + G_2\exp(-t/\tau_{2,T_2}) + G_3\exp(-t/\tau_{3,T_2}) + G_4\exp(-t/\tau_{4,T_2})$$,
- At $$T_3$$, $$G(t) = G_2\exp(-t/\tau_{2,T_3}) + G_3\exp(-t/\tau_{3,T_3}) + G_4\exp(-t/\tau_{4,T_3}) + G_5\exp(-t/\tau_{5,T_3})$$,
- Plot $$\tau_i$$ vs. $$T_j$$, which will contain five curves in this example, each curve representing the temperature dependence of the same Maxwell element.
- Fit each curve with Arrhenius or WLF equation. If the shape of curve changes near $$T_g$$, more than one set of fitting parameters is needed.
- Assuming that $$G_i$$ is not affected by temperature, while $$\tau_i$$ of each Maxwell element is affected by temperature differently,
Notes
- $$G_i$$ are kept the same going from $$T_j$$ to $$T_{j+1}$$. This assumes no thermal expansion, which is acceptable at low temperatures.
- i=3, j=5 are only examples, the exact number of Maxwell elements (i.e., the number of Prony terms) is subjected to the need for fitting experimental data.
- The observation window is narrow due to a limit of experimental time, therefore the measured data correspond to responses of a limited number of Maxwell elements. In the given example, at $$T_1$$, elements No. 1, 2, 3 are observed, while at $$T_3$$, elements No. 2, 3, 4, 5 are observed. As long as $$G_i$$ is the same throughout all temperatures, there could be as many elements as necessary to be added to the current window.
- The overall behavior at $$T_j$$ is the sum of all elements, although the contribution of the element outside the observation window is negligible.
- This alternative method is to describe non-superposable datasets, usually measured at a wide frequency and/or time range.
Other External Variables
It can be observed that the validation of time-temperature superposition method requires
- the effect of temperature is exerted on relaxation time $$\tau$$
- the functional form is $$\tau = C\cdot T^n$$ where C and n are constants. In the case of Rouse solution (Eq.42), $$n=-1$$.
To assess if the reduced time method is applicable to describe the effect of other external variables (such as aging time) on linear viscoelastic behaviors, the first step is to check the relation between the external variable and $$\tau$$.
Reference
- J. D. Ferry, Viscoelastic Properties of Polymers, 1980